Method Overview
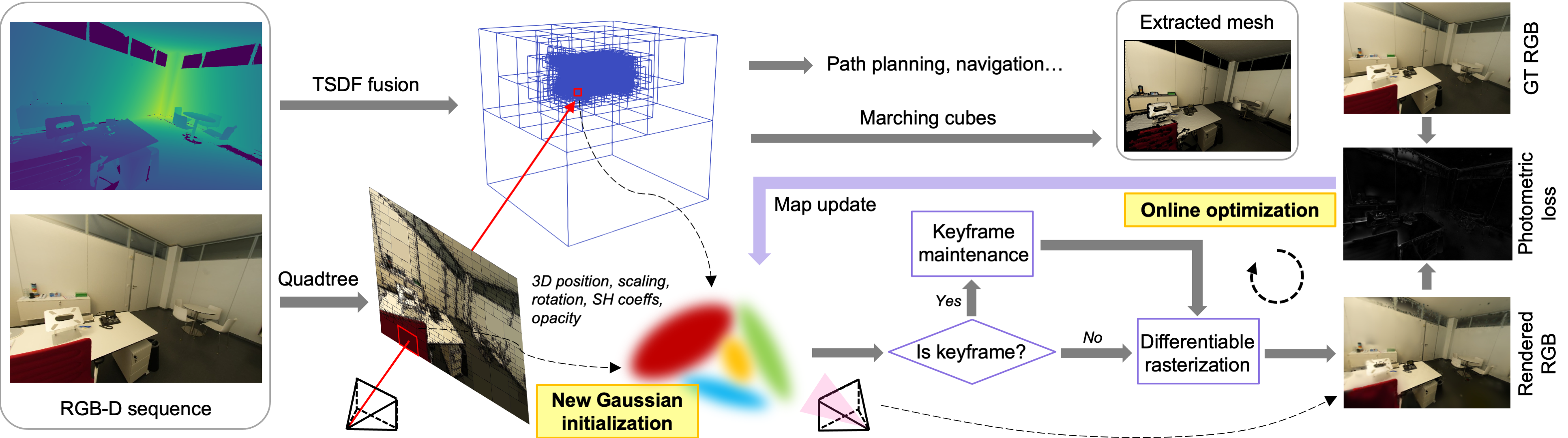
At each time step, our GSFusion takes a pair of RGB-D images as input. The depth data is fused into an octree-based TSDF grid to capture geometric structure while the RGB image is segmented using quadtree based on contrast. A new 3D Gaussian is then initialized at the back-projected center of a quadrant if there are no adjacent Gaussians by checking its nearest voxel. We optimize Gaussian parameters on the fly by minimizing the photometric loss between the rendered image and input RGB. Additionally, we maintain a keyframe set to deal with the forgetting problem. After scanning, the system provides both a volumetric map and a 3D Gaussian map for subsequent tasks.